Brick-A
The system is in development. The main purpose is to speed-up robot construction process and enable parts reuse. It is necessary to have a 3D printer at disposal. 3D printing produces parts that cannot be made using alternative technologies, the makers of standard bricks (like Lego) use. The result are strong and lightweight parts, despite minimum amount of material spent. The downside of the technology is time needed to produce the parts.
All of the parts are downloadable and customization is encouraged. If You need some parts that could be of use for many users, we may produce the models and publish them.
Compared to Lego, this system has no such a mechanical firmness. A basic 3D printer cannot produce that kind of parts. It is also a deliberate decision not to have the strongest possible system as the flexibility would suffer. More about that later. Therefore, it does not make sense to make a robot using a lot of small parts as the construction may be too fragile. The best results are achieved by printing a body of the robot, a spinal part that contains motors. We will publish a number of models for different scenarios. It may be better to use ABS instead of PLA, as it will not break so easily, but PLA also produces acceptable results. Although the cheapest printers can produce the bricks, it is advisable to have a more advanced models to get better precision.
Brick-A is a hybrid system, similar to Lego and FischerTechnik. Like FischerTehchnik, main direction of brick joining is sidewise, by sliding one brick into another. However, unlike FischerTechnik, it is possible to join the bricks vertically. So, the same joint can be used in both directions. The former type of joint is advantageous since it doesn't stress the parts much. If 3D material is not elastic enough, the joint may be damaged and will not hold firmly anymore. You will have to print it again. On the other hand, sometimes is a possibility of inserting a new part vertically very nice, as You do not have to disassemble many parts in order to access the slide-in slot. Some kind of trade off was necessary to enable the both joint types. It would be easy to change the system to get a quite strong slide-in-only system.
Basic brick is a 1x1x1 cm3 cube. It is rather small in order to enable construction of small robots. If You want to make a bigger robot, it may be better to use 2x2x2 cm3 cubes.
All the ML-R parts will have matched Brick-A holders to facilitate a fast assembly.
Bricks
3d printable models
Arena
Battery
Download
STEP model. Hobby King Zippy 1000 battery.
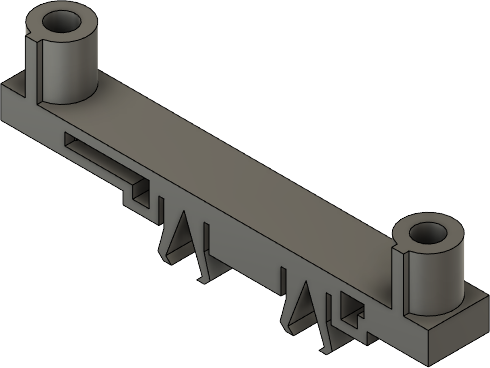
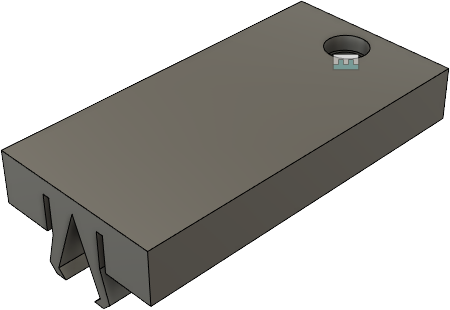
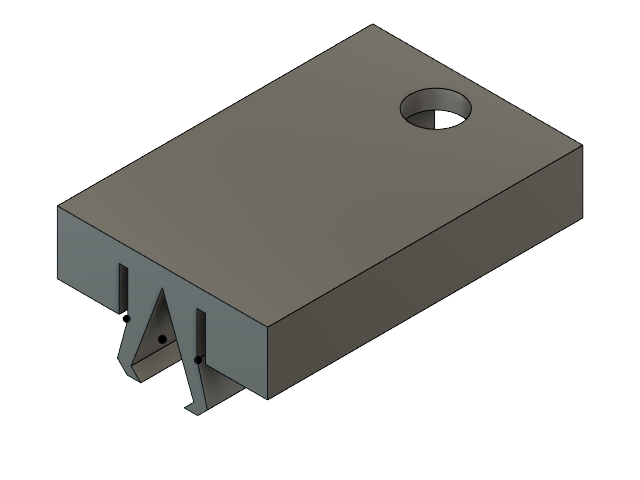
Battery holder
Download
STEP model. For smaller 2 or 3 cell LiPo batteries.

Download
STEP model. For smaller 2 or 3 cell LiPo batteries.
Download
STEP model. For smaller 2 or 3 cell LiPo batteries.
Download
STEP model. 2 pcs. needed to mount batt-lid-d.
Board holder

Download
STEP model. Holder for standard 35 mm MRMS distance between mounting holes. For use with nylon spacers.
Download
STEP model. Holder for standard 35 mm MRMS distance between mounting holes.
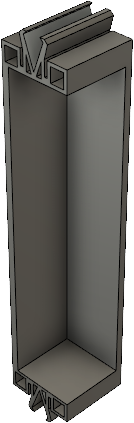
Brick 0.55 mm profile
Download
STEP model. Useful as a sliding join for sensors.
Download
STEP model. Useful as a sliding join for sensors.
Brick 1x1x1 cm3 - like
Brick 2x2x2 cm3 - like
Chassis
Door

Download
STEP model. Simple door without a locking mechanism.
Electromagnet based
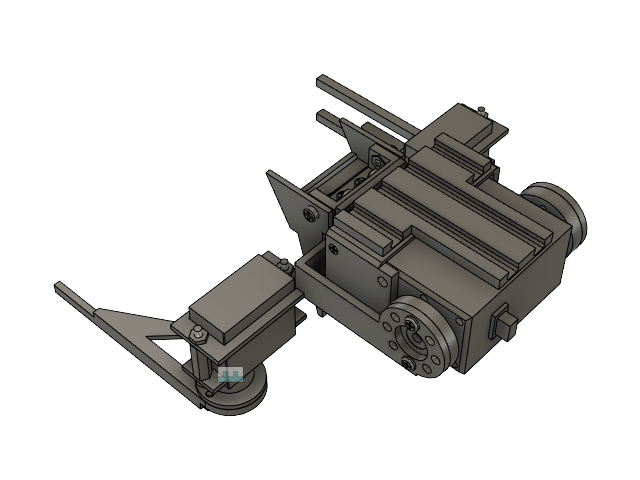
Gripper

Download
STEP model. A gripper that can grab and lift a RCJ Rescue Line ball.
Download
STEP model. A gripper that can grab and lift a RCJ Rescue Line ball.
Download
STEP model. A gripper that can grab and lift RCJ Rescue Line ball.
Joint

Download
STEP model. A joint that can be rotated around vertical axis.
Lever
Motor
Motor holder
MRMS board
Nut
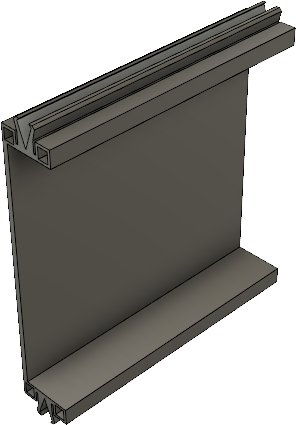
Plate

Download
STEP model. Plate for enclosing part of robot.
Download
STEP model. Plate for enclosing part of robot.

Download
STEP model. Plate for enclosing part of robot.
Download
STEP model. Plate for enclosing part of robot.
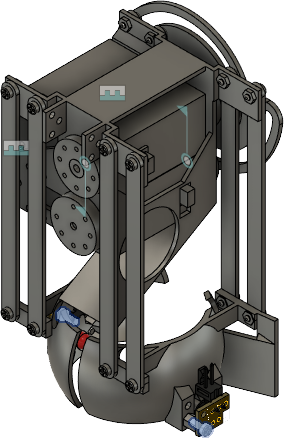
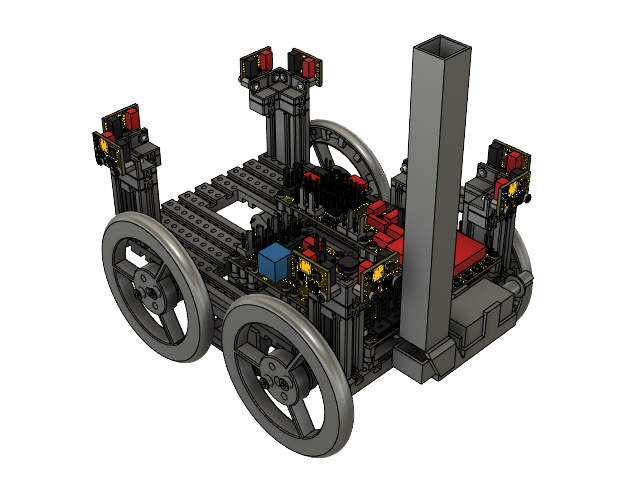
Robot

Download
STEP model. Robot for RCJ Line competition.
Download
STEP model. Robot for RCJ Maze competition.
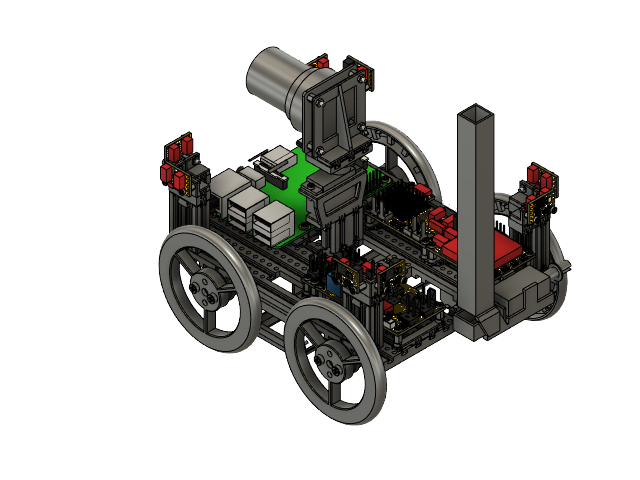
Download
STEP model. Robot for RCJ Line competition.
Sensor holder
Servo holder
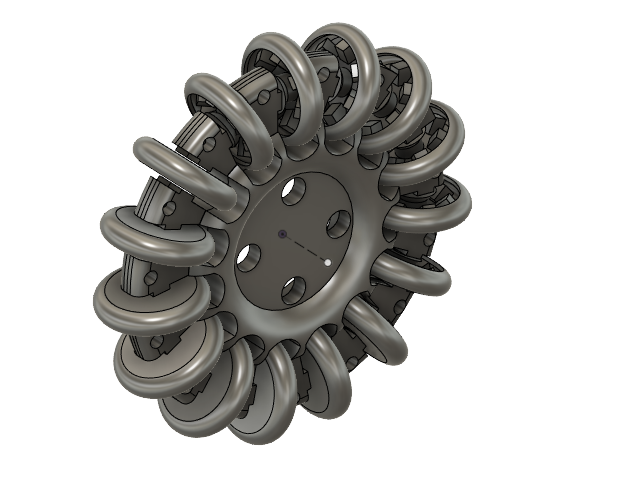
Wheel

Download
STEP model. Omni wheel for a soccer robot. Axle diameter defined by axle hub, wheel diameter around 60 mm. Mould for 9 rollers and the wheel's body.

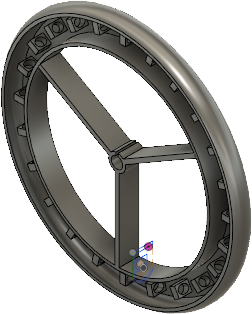
Download
STEP model. Large omni-wheel with rollers that have to be filled with silicone.
Download
STEP model. Large omni-wheel with rollers that have to be filled with silicone.

Download
STEP model. Pouring silicone will form tyre.

Download
STEP model. Pouring silicone will form tyre.

Download
STEP model. Pouring silicone will form tyre.
Download
STEP model. Pouring silicone will form tyre.
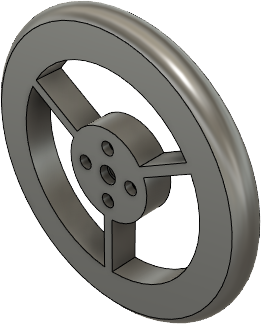
Download
STEP model. Around 12 g of silicone per tyre.
Wheel hub
3d models not used for printing
Mikrokontrolerske pločice
Mehanika
Motori
Kontroleri motora
Napajanja
Ostale pločice
Senzori
Razvod žica