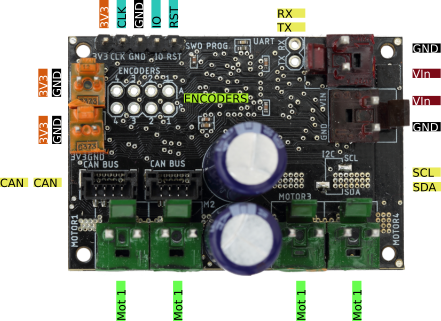
MRMS Motor Driver 4x10A reverse protection, CANBus (mrm-mot4x10)
Ukratko
Kontroler 4 srednje jaka motora s četkicama. Vršna struja 4 x 10 A. Napon motora 4.5 - 38 V. CAN Bus i I2C upravljanje. Čipovi TI DRV8873 + ARM M0. Zaštita od obrnutog napona motora.
Cijena:
46,43 €, PDV uklj
Kupi
Osobine
|
Za vrstu motora.
|
S četkicama. |
|
Broj motora
|
4. |
|
Ulazni napon.
|
4.5 - 38 V. |
|
Vršna izlazna struja.
|
4 x 10 A. |
|
Sučelje.
|
CAN Bus i I2C sučelja. Opcija UART. Firmware omogućava prilagodljivo, napredno upravljanje i dijagnostiku, koristeći CAN Bus naredbe. Npr., iz podatka o naponu na motorima, struji i upozorenju za pregrijavanje je moguće promijeniti način upravljanja motorima. |
|
Energetska efikasnost.
|
Low-Power Sleep Mode (10 µA) po čipu za kontrolu motora (njih 4). |
|
Zaštita od obrnutog ulaznog napona.
|
Da. |
|
Zaštita od podnapona (UVLO).
|
Da. |
|
Zaštita od prevelike struje (OCP).
|
Da. |
|
Zaštita od pregrijavanja (TSD).
|
Da. |
|
Ostale zaštite
|
Zaštita od preniskog napona pumpe za gornje FETove (CPUV). Zaštita od kratkog spoja prema bateriji ili zemlji. Detekcija nepostojećeg izaznog tereta. Dojava greške i njene vrste. |
|
Mjerenje izlazne struje.
|
Zrcalo struje - ne treba otpornik. |
|
Vanjski tranzistori.
|
Ne. |
|
Mogućnost dogradnje firmwarea.
|
Da. Firmware dodatnog mikrokontrolera se može mijenjati, ali treba imati STM ARM programator. Može se jeftino nabaviti na Ebayu. Više podataka ovdje. |
|
RDS(ON) (drain-source on resistance)
|
Mali HS + LS RDS(ON): 150 mΩ na TJ = 25°C, 13.5 V, 250 mΩ na TJ = 150°C, 13.5 V. Vrijednosti za 1 motor. |
|
Čip
|
32-bitni ARM M0 mikrokontroler, povezan s čipovima za kontrolu motora putem SPI sabirnice (TI DRV8873). |
|
Mjerenja napona motora
|
Da. |
|
Ulazi za enkodere
|
Da. |
|
Izlazni kondenzatori za motore.
|
Veliki kondenzatori, blizu 2 mF. |
|
Status LED.
|
Da. Više detalja ovdje. Dodatni LED za grešku. |
|
Stardardizirani format.
|
Da. Više detalja ovdje. |
|
Plug and play.
|
Da. Više detalja ovdje. |
|
Konektor motora
|
4 x Molex KK396. |
Potrebni elementi
Spajanje
Connectors
To connect MRMS motors, use ML-R 16D Motor Connector (mrm-16d2) or ML-R 25D Motor Connector (mrm-25d), soldered to motors. In this was it is possible to use standard cables, like ML-R Cable KK396-KK254 20 cm (mrm-kk3.96-2.54-20) and ML-R Cable KK396-KK396 20 cm (mrm-kk3.96-3.96-20), to avoid breaking of soldered connection on motor in critical moments.
If you connect Pololu 20D motors, use ML-R 20D Motor Connector (mrm-20d), for Pololu 25D motors ML-R 25D Motor Connector (mrm-25d), for N20 use ML-R N20 Motor Connector (mrm-n20). Other motors may fit into the adapters, but it is not for sure. Contact pattern may vary. Check the measures.
You can connect any other motor by making cables yourself. Motor end is motor-dependent. For controller end, use a kit, like Connector set 6xKK396 + 2xKK254 (mrm-con6-2), and You will get all the connectors for this board. Another possibility are semi-finished cables like ML-R Cable KK396 - bare (mrm-kk3.96-no-20) which have bare wires on motor end and matching connectors on controller side. To connect CAN Bus to standard Dupont 0.1" pins, use Adapter cable CAN Bus - 4 x Dupont (mrm-can-dup20).
Here are the details about 2 possible way to connect the controller to Your system.
Softver
Board's firmware can be upgraded, though the process is not simple. Read this page.